Vera is an equivalence checking tool for nonlinear analog circuits.
Gnucap-UF is a gnucap fork targeted at research and experiments.
The following tarballs are available: gnucap-uf, vera-static-binary and gnucap-adms-plugin. See here for instructions on how to build debian binary packages.
The gnucap-adms package provides an
admsXml based model
compiler for devices written in verilog-a. It covers a (growing) subset of verilog-a.
To get a loadable module from verilog-a, (install gnucap-adms and) type
gnucap-adms -c device.va.
Sometimes it is more convenient to embed models into netlists. See the following example.
load lang_adms.so
options reltol=1e-4
adms
`include "discipline.h"
module pid(sp,sn,cp,cn);
in sp,sn,cp,cn;
electrical sp,sn,cp,cn;
parameter real p = 1 from [0:inf);
parameter real i = 1 from [0:inf);
parameter real d = 1 from [0:inf);
analog begin
V(sp,sn) <+ p * V(cp,cn);
V(sp,sn) <+ i * idt(V(cp,cn));
V(sp,sn) <+ d * ddt(V(cp,cn));
end
endmodule
endadms
paramset mypid pid;
.p=1;
.i=1;
.d=.05;
endparamset
mypid pid1 (nout, 0, ndelta, 0);
spice
E1 ndelta 0 nin nload 1
rfake0 nin ndelta 1e12
rfake1 nin nload 1e12
Vreg nin 0 pulse iv=0 pv=1 rise=3 delay=1 width=50 fall=10
rout nout nload 10k
cl nload 0 1m
ll 0 nl 10u
rl nload nl 100k
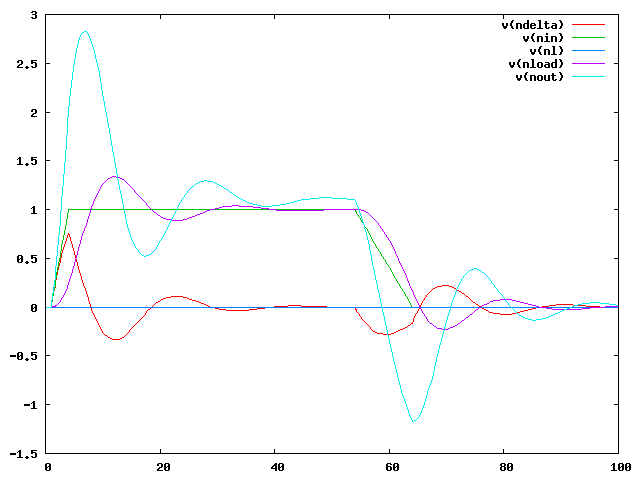
.print tran v(nodes) method(pid1)
.tran 0 100 100 trace=a > pid.out echo
.plot tran v(nload)(0,2) v(nout)(0,2)
.options outwidth 200
.tran 0 100 1 trace=n
.print ddc v(nodes) dv(nodes)
.ddc
.end
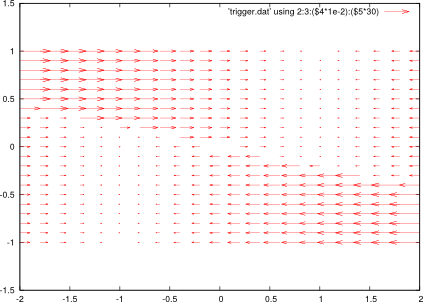
Dynamic dc (ddc) analysis analyzes the dynamics of consistent operating points.
For example, consider a simple schmitt trigger circuit and its
operating points parameterized by input voltage and capacitor charge.
ddc analysis computes the time derivatives of the node voltages (dv) at a
consistent operating point close to the specified initial conditions.
The output file trigger.dat contains the vector flow on the
state space. The operating points are the zeroes of the vector field.
The two connected components of the two contractive zeroes are
clearly visible in the plot. These are the stable states of the circuit.
Our verification tool Vera
uses gnucap-uf as a simulator
backend. It is available as a binary executable
(here)
ready to use.
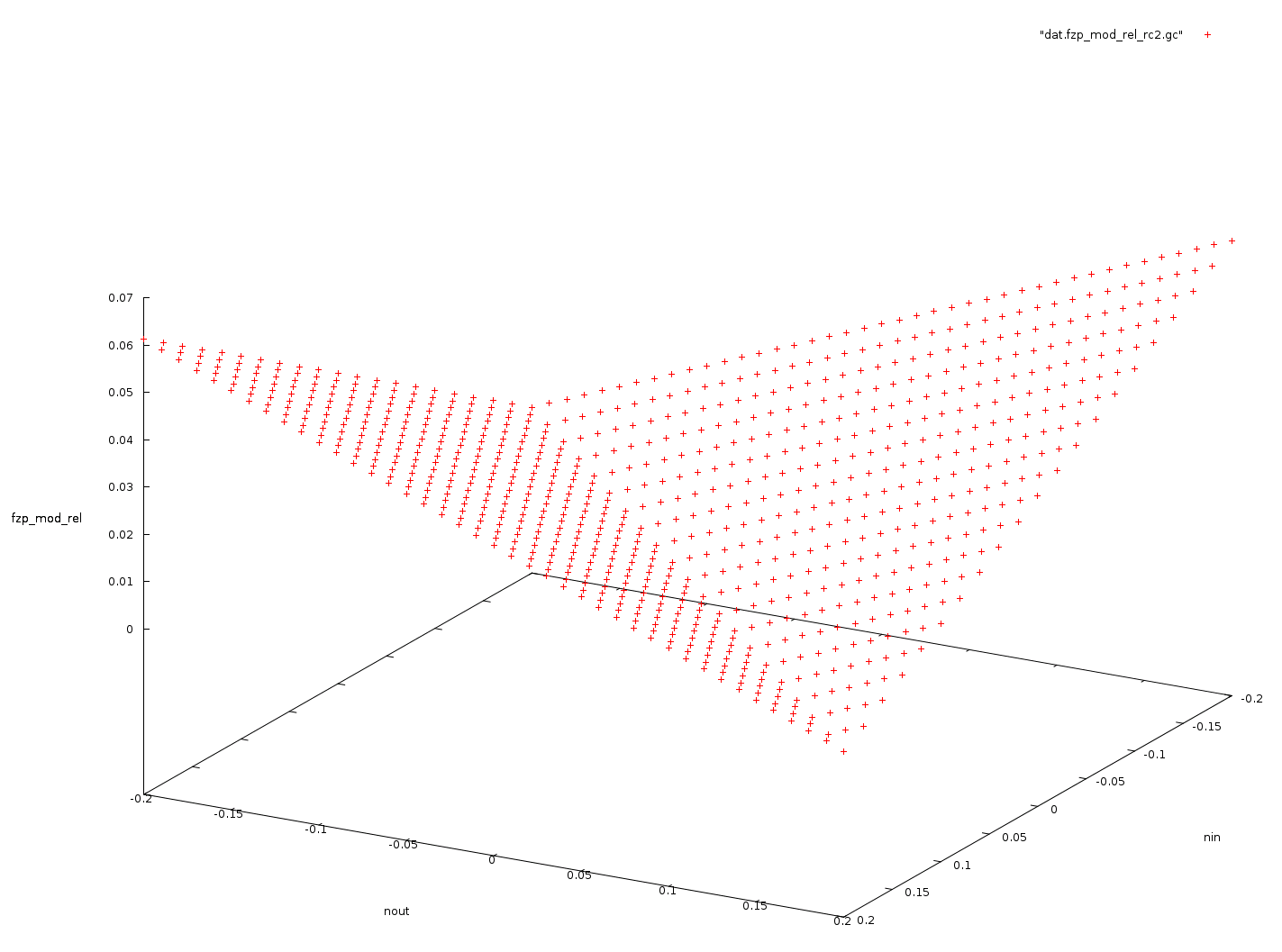
Consider two similar lowpass filters.
The equivalence check yields a measure for the difference of these filters. For
example, we may plot the difference in dynamic behaviour as a function over the
state space.